پهپاد RAVEN دانشگاه EPFL، یک پرنده ثابتبال است که میتواند بدون نیاز به باند فرود، با الهام از پاهای پرندگان به پرواز درآید.
پهپاد RAVEN دانشگاه EPFL، جایگزین چرخهای فرود سنتی با پاهایی شده که عملکردی مشابه پاهای پرندگان دارند. اندرو لیزفسکی یکی از گزارشگران ارشد است که از سال ۲۰۱۱ به بررسی و نقد آخرین دستاوردهای فناوری پرداخته است، اما علاقهاش به دنیای الکترونیک از دوران کودکی شکل گرفته است.
محققان دانشگاه فدرال پلیتکنیک لوزان (EPFL) در سوئیس و دانشگاه کالیفرنیا، ایرواین (UC Irvine)، پهپادی توسعه دادهاند که قادر است در مناطقی فرود بیاید و بلند شود که معمولاً پرندههای ثابتبال را به بنبست میکشاند. پهپاد RAVEN (خودروی رباتیک الهامگرفته از پرندگان برای محیطهای متعدد) به جای تجهیزات فرود سنتی، از پاهایی با مفاصل شبیه به پاهای پرندگان استفاده میکند که به آن اجازه میدهد روی زمین حرکت کند، از موانع بپرد و حتی با یک پرش قوی به پرواز درآید بدون نیاز به باند فرود.
پهپادهای چهارموتوره (Quadcopter) ممکن است انعطافپذیری بیشتری در محلهای پرواز و فرود داشته باشند، اما بیشتر آنها به چهار موتور متکی هستند که از نظر مصرف انرژی کارآمدتر از پرندههای ثابتبال نیستند. پرندههای ثابتبال با استفاده از یک موتور و گلایدینگ (لغزش در هوا) انرژی کمتری مصرف میکنند. برای گسترش تواناییهای پرندههای ثابتبال، محققان از پرندگانی مثل کلاغ و غراب الهام گرفتند که به راحتی میتوانند با پاهای نحیف خود روی زمین حرکت کنند. این موضوع در مقالهای که این هفته در مجله Nature منتشر شده، به تفصیل شرح داده شده است.
نگاهی دقیق به پاهای پهپاد RAVEN
پاهای RAVEN و انگشتان آن از طراحی سادهای بهره میبرند، اما همچنان مفاصل کافی برای حرکت روی زمین دارند.
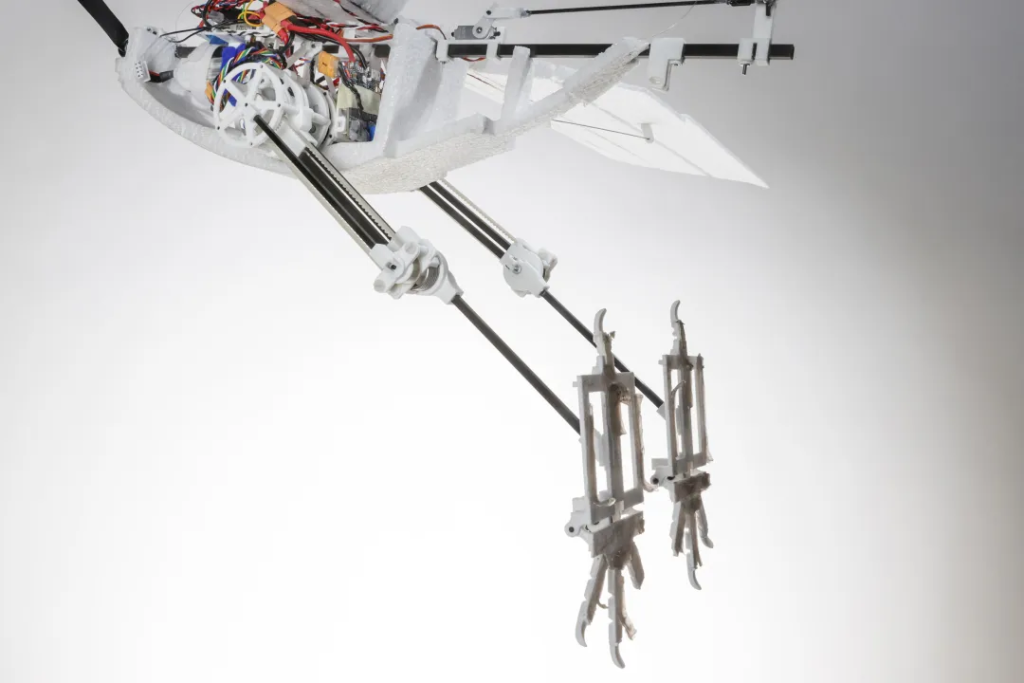
تصویر: آلن هرتزوگ
بهکارگیری قدرت و تواناییهای پاهای پرندگان به صورت مکانیکی، بدون افزودن وزن قابل توجه به پهپاد و کاهش برد عملیاتی آن، نیازمند ترکیبی از “مدلهای ریاضی، شبیهسازیهای کامپیوتری و تکرارهای تجربی” بود.
طرح نهایی پاها از ترکیبی از فنرها و موتورها برای تقلید از “زهها و عضلات قوی پرندگان” استفاده میکند، در حالی که طراحی سادهشده پاها شامل “دو ساختار مفصلی” و انگشتانی با مفاصل الاستیک غیرفعال است. انگشتان نه تنها از برخورد مستقیم RAVEN با زمین جلوگیری میکنند، بلکه برای راه رفتن و تنظیم زاویه حمله مناسب برای برخاستن مؤثر نیز ضروری هستند.
استفاده از پاها برای برخاستن و فرود کوتاه در پرندههای ثابتبال ایدهای کاملاً جدید نیست. در سال ۲۰۱۹، استارتاپی از آفریقای جنوبی به نام Passerine، پهپادی به نام Sparrow را معرفی کرد که از پاهایی فنری برای پریدن به هوا و پرواز از حالت سکون استفاده میکرد. آنچه RAVEN را متمایز میکند، پیچیدگی پاهای آن است که به پهپاد اجازه میدهد از سطوح ناهموار عبور کند، از شکافها بپرد و حتی بر روی موانعی به ارتفاع ۱۰ اینچ بپرد — علاوه بر توانایی پریدن به هوا.
عملیات RAVEN محدود به فرودگاهها یا مناطق با سطح صاف نیست، چیزی که تجهیزات فرود چرخدار سنتی نیاز دارند. همچنین نیازی به دخالت انسان برای بلند شدن مجدد ندارد. این پهپاد قادر است در مناطقی که ممکن است برای انسانها خطرناک یا ممنوع باشد فرود آید و سپس خود را به موقعیتی ایمن برای برخاستن منتقل کند. و تمام این کارها را با مصرف انرژی کمتر از پهپادهای چهارموتوره انجام میدهد، که به آن برد عملیاتی بزرگتری میدهد.